 本文介绍了如何在Ubuntu20.04上安装和配置用于激光雷达和相机参数标定的SensorsCalibration软件,涉及Cmake、OpenCV2.4、Eigen3、PCL1.9和Pangolin等库的安装步骤,以及可能遇到的错误解决方案。
本文介绍了如何在Ubuntu20.04上安装和配置用于激光雷达和相机参数标定的SensorsCalibration软件,涉及Cmake、OpenCV2.4、Eigen3、PCL1.9和Pangolin等库的安装步骤,以及可能遇到的错误解决方案。
一、概况
这是一个用于标定激光雷达和相机参数的软件。
官网:https://github.com/PJLab-ADG/SensorsCalibration
我的配置:Ubuntu 20.04 LTS
二、使用介绍
进入官网,下载源代码:
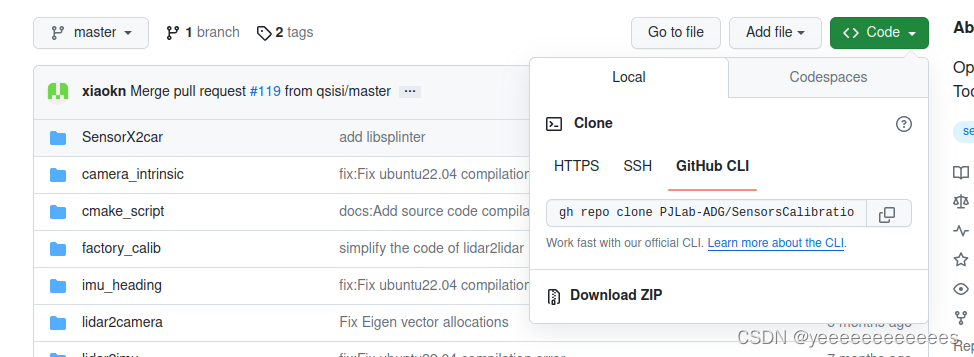
下载之后解压,进到 ./SensorCalibration/lidar2camera/manual_calib 文件夹下
根据官网要求,安装支撑项:
Cmake:参考ubuntu20.04安装cmake详细教程_l550802356的博客-CSDN博客
或直接运行:
sudo apt install cmakeOpencv2.4:参考Ubuntu 安装opencv2.4的过程_ubuntu安装opencv2.4-CSDN博客
eigen 3:参考https://blog.csdn.net/HAICHANG1105/article/details/131201197
PCL 1.9:参考Ubuntu20.04安装pcl1.9.1_很菜又爱学的博客-CSDN博客
或者直接运行
sudo apt-get install libpcl-dev
但是ubuntu20.04默认安装的是pcl-1.10.1版本,这在后续编译的时候会报错,提示需要安装1.9版本,这时候只需要修改 /SensorsCalibration/lidar2camera/manual_calib/CMakeList.txt文件中的PCL版本要求进行,实测pcl-1.10.1对运行没影响。
![]()
Pangolin:参考Ubuntu中pangolin库的安装配置及问题解决_pangolin安装详细步骤_羊羊羊ox的博客-CSDN博客
然后根据官网的步骤执行就可以了!
整个过程中,安装pcl-1.9可能会遇到点麻烦,其它的步骤挺顺利的。
可能遇到的错误及解决办法: